
مقدمه: انقلاب در ایمنی فعال خودرو
آیا تا به حال فکر کردهاید که در لحظهای که کنترل خودرو را از دست میدهید، چه فناوریای به صورت پنهان و در کسری از ثانیه میتواند جان شما را نجات دهد؟ سیستمهای کنترل پایداری الکترونیکی (ESP که توسط برخی خودروسازان ESC نیز نامیده میشود) و سیستم کنترل کشش (Traction Control) دو شوالیه نامرئی در کمین هستند که خودروی شما را در شرایط لغزنده یا هنگام مانورهای ناگهانی از سقوط نجات میدهند. هرچند این دو سیستم با یکدیگر همکاری میکنند و از قطعات مشترکی بهره میبرند، اما هدف و نحوه عملکردشان کاملاً با هم متفاوت است.
این مقاله یک راهنمای جامع برای درک این فناوریهای نجاتبخش است؛ از نحوه عملکرد هر یک به صورت جداگانه گرفته تا تفاوتهای دقیقشان، و اینکه چگونه این دو سیستم ایمنی فعال به عنوان یک تیم، خودروی شما را در جاده نگه میدارند.
بخش اول: کنترل کشش (Traction Control System - TCS)
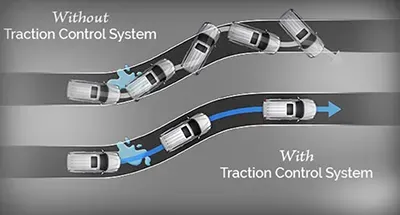
سیستم کنترل کشش، که اغلب با اختصار TCS شناخته میشود، یک سیستم ایمنی بنیادی است که عمدتاً برای حفظ چسبندگی خودرو با سطح جاده، به ویژه هنگام شتابگیری و در سطوح لغزنده، طراحی شده است.
۱.۱. هدف و عملکرد اولیه TCS
هدف اصلی TCS، جلوگیری از هرزگردی چرخها است. هرزگردی زمانی اتفاق میافتد که چرخها به دلیل نیروی بیش از حد موتور یا وجود سطح لغزنده (مانند یخ، برف، گل یا جاده خیس)، سریعتر از سرعت واقعی خودرو میچرخند و چسبندگی خود را با سطح جاده از دست میدهند.
نحوه عملکرد:
-
تشخیص: TCS به طور پیوسته سرعت هر چرخ را از طریق سنسورهای سرعت چرخ (همان سنسورهای سیستم ترمز ضد قفل یا ABS) بررسی میکند.
-
مقایسه: سیستم، سرعت یک چرخ محرک را با چرخ دیگر یا با سرعت کلی خودرو مقایسه میکند. اگر متوجه شود که چرخ به طور ناگهانی شروع به چرخیدن با سرعت بیشتری کرده است (هرزگردی)، بلافاصله وارد عمل میشود.
-
تصحیح (دو روش):
-
کاهش قدرت موتور: این روش رایجترین راهکار است. سیستم به واحد کنترل موتور (ECU) فرمان میدهد تا میزان سوخت و هوای ورودی را کاهش داده یا زمانبندی جرقهزنی شمعها را تغییر دهد. این کار باعث میشود نیروی کمتری به چرخها منتقل شود.
-
اعمال ترمز انتخابی: در این روش، TCS به طور مستقل به چرخ هرزگرد ترمز میگیرد. این عمل باعث انتقال گشتاور موتور به چرخ دیگری میشود که چسبندگی بهتری دارد.
-
۱.۲. سناریوهای کاربرد TCS
TCS در موقعیتهای زیر به طور مداوم فعال و حیاتی است:
-
شروع حرکت روی برف و یخ: جلوگیری از گیر کردن خودرو با کاهش هرزگردی.
-
خروج از گِل یا ماسه: با مدیریت نیروی وارده به هر چرخ، به خودرو کمک میکند تا به آرامی از سطح لغزنده خارج شود.
-
شتابگیری ناگهانی: حتی روی آسفالت خشک، شتابگیری بیش از حد میتواند باعث هرزگردی چرخها شود که TCS آن را کنترل میکند.
بخش دوم: سیستم کنترل پایداری (ESP/ESC)
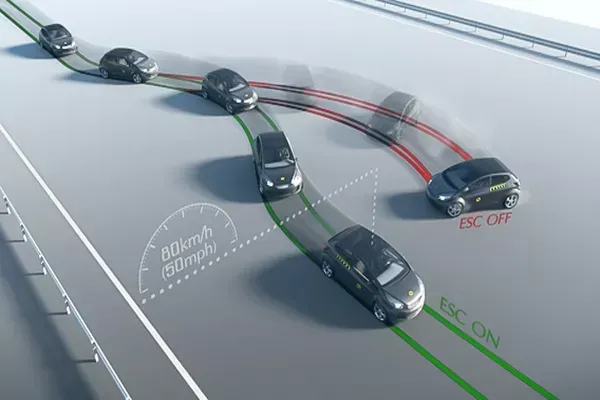
سیستم کنترل پایداری الکترونیکی (Electronic Stability Program/Control یا ESP/ESC) بسیار پیشرفتهتر و جامعتر از TCS است. در حالی که TCS بر جلوگیری از هرزگردی در حرکت مستقیم تمرکز دارد، ESP بر کنترل جهت و پایداری جانبی خودرو در شرایط بحرانی، به ویژه در پیچها و مانورهای ناگهانی، متمرکز است. ESP یک سیستم نجاتبخش است و تحقیقات نشان داده که استفاده از آن، احتمال تصادفات ناشی از انحراف و از دست دادن کنترل را تا حد زیادی کاهش میدهد.
۲.۱. هدف و عملکرد پیچیده ESP
هدف اصلی ESP جلوگیری از از دست رفتن کنترل راننده است که معمولاً به دو صورت اتفاق میافتد:
-
Oversteer (انحراف بیش از حد): زمانی که عقب خودرو بیشتر از فرمان راننده منحرف میشود و خودرو به سمت داخل پیچ میچرخد (پشت خودرو لیز میخورد).
-
Understeer (کمفرمانی): زمانی که جلوی خودرو چسبندگی خود را از دست داده و به جای پیچیدن به سمت دلخواه، به سمت بیرون پیچ سر میخورد.
نحوه عملکرد:
ESP یک سیستم پیچیده و هوشمند است که بر اساس دادههای چند سنسور کار میکند:
-
سنسور زاویه فرمان (Steering Angle Sensor): تشخیص میدهد که راننده میخواهد به کدام سمت برود.
-
سنسور سرعت چرخ: تشخیص میدهد که چرخها با چه سرعتی در حال چرخش هستند (مشابه ABS و TCS).
-
سنسور Yaw Rate (نرخ انحراف): مهمترین سنسور ESP. این سنسور میزان چرخش خودرو حول محور عمودی (مانند چرخش یک فرفره) را اندازهگیری میکند.
-
سنسور شتاب جانبی (Lateral Acceleration Sensor): نیروی گریز از مرکز وارد بر خودرو در پیچها را اندازهگیری میکند.
مراحل دخالت ESP:
-
تحلیل داده: ESP به طور مداوم دادههای این سنسورها را با هم مقایسه میکند.
-
تشخیص بحران: اگر زاویه فرمان (خواست راننده) با نرخ انحراف واقعی خودرو تفاوت زیادی داشته باشد، سیستم تشخیص میدهد که خودرو در حال از دست دادن کنترل است.
-
اعمال تصحیح:
-
در شرایط Oversteer: ESP به چرخ جلویی خارجی (مثلاً چرخ جلو سمت راست در یک پیچ به راست) ترمز میگیرد. این عمل باعث ایجاد یک گشتاور متقابل میشود که عقب خودرو را به سمت مسیر مورد نظر برمیگرداند.
-
در شرایط Understeer: ESP به چرخ عقبی داخلی (مثلاً چرخ عقب سمت چپ در یک پیچ به راست) ترمز میگیرد تا جلوی خودرو را به داخل پیچ هدایت کند و سرعت را کاهش دهد.
-
کاهش قدرت موتور: همزمان، ESP برای جلوگیری از تشدید بحران، به ECU فرمان میدهد که قدرت موتور را کاهش دهد.
-
بخش سوم: تفاوتهای کلیدی و رابطه متقابل
اگرچه TCS و ESP هر دو از ترمز و کاهش قدرت موتور برای اصلاح استفاده میکنند و هر دو بخشی از زیرسیستمهای ABS هستند، اما در هدف و سطح پیچیدگی عملکرد تفاوتهای محوری دارند.
۳.۱. جدول مقایسه تفاوتها
| ویژگی اصلی | سیستم کنترل کشش (TCS) | سیستم کنترل پایداری (ESP/ESC) |
| هدف اصلی | جلوگیری از هرزگردی در حین شتابگیری. | حفظ کنترل و جهت خودرو در شرایط انحراف و لغزش جانبی. |
| مسئله مورد هدف | از دست دادن کشش و چسبندگی طولی (جلو/عقب). | از دست دادن کنترل و پایداری جانبی (چپ/راست). |
| سنسورهای اصلی | سنسورهای سرعت چرخ. | سنسور سرعت چرخ، زاویه فرمان، Yaw Rate، شتاب جانبی. |
| نحوه دخالت | اعمال ترمز به چرخ هرزگرد، کاهش قدرت موتور. | اعمال ترمز انتخابی به یک یا چند چرخ مختلف، کاهش قدرت موتور. |
| سطح پیچیدگی | پایه (Foundation) | پیشرفته (Superstructure) |
| بهترین کاربرد | شروع حرکت در برف، شتابگیری. | مانور اضطراری، پیچهای تند، جادههای لغزنده. |
۳.۲. رابطه کاری (همافزایی)
ESP را میتوان به عنوان یک سیستم جامعتر در نظر گرفت که TCS بخشی از آن است. به عبارت دیگر:
-
TCS یک سیستم فرعی ESP است: در بسیاری از خودروها، زمانی که TCS فعال میشود، اگر وضعیت به اندازه کافی بد شود که پایداری جانبی خودرو به خطر بیفتد، ESP نیز به صورت خودکار فعال میشود.
-
ابزارهای مشترک: هر دو سیستم از پمپ هیدرولیک، واحد کنترل الکترونیکی (ECU) و سنسورهای سرعت چرخ سیستم ABS استفاده میکنند. ABS (سیستم ترمز ضد قفل) نیز با جلوگیری از قفل شدن چرخها هنگام ترمز، یک لایه ایمنی دیگر به این مجموعه اضافه میکند.
بخش چهارم: تکامل، اهمیت و نتیجهگیری

۴.۱. الزامات قانونی و اهمیت حیاتی
اهمیت ESP آنقدر زیاد است که توسط بسیاری از دولتها در سراسر جهان (از جمله اتحادیه اروپا، ایالات متحده و کانادا) اجباری شده است. دلیل این امر، شواهد آماری قوی مبنی بر کاهش چشمگیر تصادفات و مرگ و میرهای ناشی از انحراف خودرو است. یک راننده با تجربه ممکن است در شرایط بحرانی بتواند با مهارت خود، کنترل خودرو را تا حدودی حفظ کند، اما ESP در کسری از ثانیه (سریعتر از هر انسان) واکنش نشان میدهد.
۴.۲. فناوریهای مکمل
این سیستمها به تنهایی کار نمیکنند، بلکه با سایر سیستمهای پیشرفته مانند:
-
AEB (ترمز اضطراری خودکار): تشخیص موانع و ترمزگیری خودکار.
-
Lane Keep Assist (دستیار حفظ مسیر): حفظ خودرو در بین خطوط جاده.
۴.۳. نتیجهگیری: تیمی برای بقا
سیستمهای کنترل کشش و کنترل پایداری، دو رکن اساسی در مهندسی ایمنی مدرن خودرو هستند. TCS مانند یک نگهبان اولیه است که مطمئن میشود هنگام انتقال قدرت، چرخها نلغزند. در مقابل، ESP/ESC مانند یک فرمانده کل عمل میکند که در صورت از دست رفتن جهت و پایداری در یک مانور یا پیچ، با ترمزگیریهای انتخابی و هوشمندانه، خودرو را دوباره به مسیر باز میگرداند.
در نهایت، درک تفاوت بین این دو سیستم حیاتی است. این فناوریها به رانندگان اطمینان میدهند که در دنیای پیشرفته خودرو، ایمنی دیگر یک آرزو نیست، بلکه یک استاندارد است. با این حال، باید همیشه به یاد داشت که این سیستمها ابزارهایی برای کمک هستند و جایگزین رانندگی محتاطانه و مسئولانه نمیشوند.





نظر خودتون رو ثبت کنید